デジタル vs アナログ FPV システム

ファーストパーソンビュー(FPV)システムは、ドローンの目であり、機体からリアルタイムの映像をゴーグルやモニターに送信します。私は長年にわたり、さまざまな環境で両方の技術を使用して飛行してきた経験から、デジタルとアナログのFPVシステムの選択は、FPVパイロットとして最も重要な決定の1つであると言えます。この包括的なガイドでは、私の広範な実地経験に基づいて両方の技術を探求し、あなたのフライングスタイルと予算に最適のシステムを決定するのに役立ちます。
FPVビデオシステムの概要
FPVビデオシステムは、ドローンからビデオフィードを視聴デバイスに送信するために連携して動作するいくつかの重要なコンポーネントで構成されています:
- カメラ: ビデオ画像をキャプチャします
- ビデオトランスミッター(VTX): ビデオ信号をエンコードして放送します
- ビデオレシーバー(VRX): ビデオ信号を受信してデコードします
- ディスプレイ: ビデオフィードを表示するゴーグルまたはモニター
アナログとデジタルのシステムの根本的な違いは、このビデオデータを処理して送信する方法にあり、この違いによって全く異なる飛行体験が生まれることを私は発見しました。
アナログFPVの基本
アナログFPVシステムは、ビデオを連続波形信号として送信します。この技術は、FPV飛行の開始以来、その中核をなすものであり、今日でも広く使用されています。
アナログの仕組み:
- カメラがアナログビデオ信号をキャプチャします(通常、PALまたはNTSC形式)
- ビデオトランスミッターは、この信号を無線周波数搬送波に変調します
- ビデオレシーバーは、受信した信号を復調します
- ディスプレイは、結果のビデオフィードを表示します
私は2019年からアナログシステムを使用していますが、その特徴の1つは、距離と干渉によって徐々に劣化し、信号品質の低下に伴って特徴的な静止画、ノイズ、「スノー」が発生することです。この徐々の劣化は、実際には信号強度に関する有用なフィードバックを提供し、私の多くのドローンが失われるのを救ってきました。
デジタルFPVの基本
デジタルFPVシステムは、送信前にビデオをデジタルデータパケットに変換します。この根本的な違いにより、完全に異なるユーザーエクスペリエンスが生まれます。
デジタルの仕組み:
- カメラがデジタルビデオ信号をキャプチャします
- ビデオトランスミッターは、多くの場合圧縮を使用してこのデータをエンコードし、デジタルパケットとして送信します
- ビデオレシーバーは、これらのパケットを収集してデコードします
- ディスプレイは、結果のビデオフィードを表示します
2021年にDJIデジタルシステムで初めて飛行したときのことを覚えています。それは私のアナログセットアップと比較して、クリスタルクリアなHD画像に驚かされる啓示でした。しかし、デジタル信号は、信号が特定のしきい値を超えて劣化するまで完璧な画質を維持し、その時点で画像がフリーズ、ピクセル化、または完全にドロップアウトする可能性があることをすぐに学びました。アナログの徐々の劣化の後、この「崖っぷち」のパフォーマンスに慣れるのに少し時間がかかりました。
アナログとデジタルのFPVシステムの比較
画質
アナログ:
- 解像度は通常、標準画質(NTSC: 720×480、PAL: 720×576)に制限されます
- 色の精度とダイナミックレンジが低い
- 干渉、静止画、ノイズを起こしやすい
- 距離/干渉によって画像が徐々に劣化する
- 応答性を好むパイロットがいる特徴的な「アナログルック」
デジタル:
- HD解像度が利用可能(720p、1080p、またはそれ以上)
- 優れた色再現性とダイナミックレンジ
- 静止画やノイズのないクリーンな画像
- 信号のしきい値に達するまで完璧な画質を維持
- 一部のシステムでは、ゴーグルでの録画機能を提供
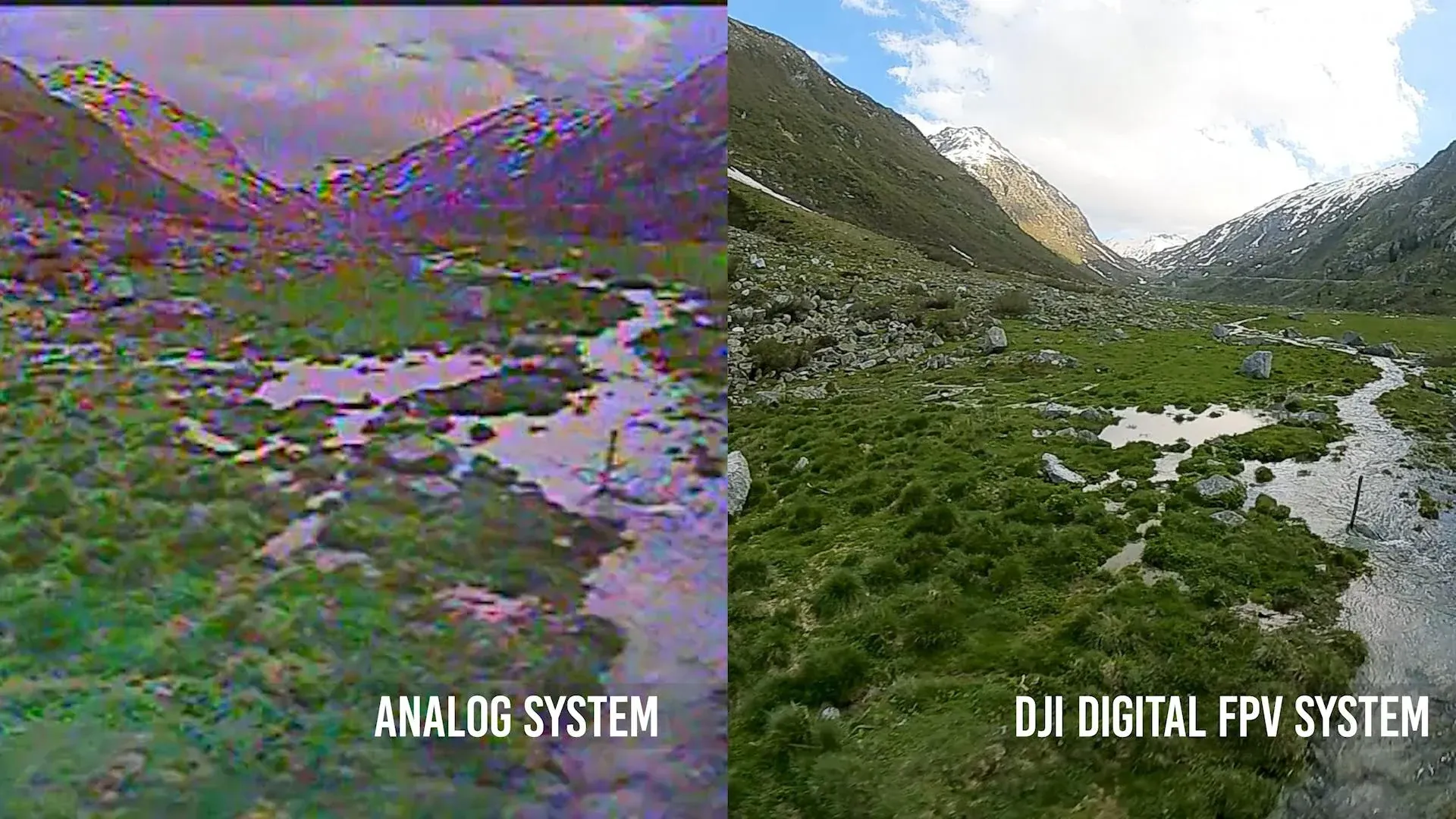
画質の違いは歴然としています。デジタルに切り替えた当初、アナログでは単にぼやけた形だった枝や障害物が突然見えるようになりました。フリースタイルやシネマティックな飛行では、このクリア度はゲームチェンジャーです。しかし、アナログの「ノイズ」は実際には信号強度に関する有用な情報を提供しており、デジタルで飛行するときにそれを見逃していることに気づきました。静止画の増加が引き返す警告を与えてくれたアナログのドローンよりも、突然のビデオロスによってデジタルのドローンをより多くクラッシュさせてしまいました。
レイテンシー
レイテンシー(カメラの前で起こることとゴーグルで見えることの間の遅延)は、応答性の高い飛行に不可欠です。
アナログ:
- 通常、非常に低いレイテンシー(15〜40ms)
- 信号強度に関係なく一定のレイテンシー
- 反応時間が重要なレースや高速フリースタイルに好まれる
デジタル:
- 歴史的に高いレイテンシー(50〜100ms以上)
- 最新のシステムは大幅に改善(30〜50ms)
- 信号が弱い場合、エラー訂正のためにレイテンシーが増加する可能性がある
- 一部のシステムでは、画質を低下させた低レイテンシーモードを提供
私は主にアナログシステムでレースを行っています。なぜなら、時速80マイルでゲートをくぐり抜けるときは、1ミリ秒ごとに重要だからです。最新のデジタルシステム(HDZeroなど)の改善されたレイテンシーでさえ、高速レースのシナリオでは依然として顕著であることがわかりました。ただし、フリースタイルやシネマティックな飛行では、デジタルシステムのわずかに高いレイテンシーが私のパフォーマンスに影響を与えることはほとんどありません。私は高速カメラを使用して、実際のエンドツーエンドのレイテンシーを測定しましたが、メーカーの主張は楽観的であることが多く、特にデジタルシステムではそうであることに注意する価値があります。
到達範囲と貫通力
距離や障害物を通して使用可能なビデオフィードを維持する能力は、システム間で大きく異なります。
アナログ:
- 一般に、障害物を通過する貫通力が良好
- 信号の徐々の劣化により、完璧な受信を超えて飛行可能
- 指向性アンテナとより高出力のVTXで到達範囲を拡張可能
- 信号が弱い場合でも寛容(静止画でも使用可能な画像を提供)
デジタル:
- 開けた場所では最大到達距離が長くなることが多い
- 障害物を通過する際の電波の減衰が大きい傾向がある
- 信号が弱くなると急に途切れる
- 一部のシステムでは、画質を落として到達距離を伸ばす「レスキューモード」を提供している
私は両方の技術を使って長距離飛行をしたことがありますが、それぞれに長所があります。最適化したアナログセットアップ(1W VTXと指向性アンテナを使用)では、地方で7kmまで使用可能な信号を維持できました。DJIシステムでも同様の到達距離を実現していますが、途切れるまでははるかにクリアな画像が得られます。
最大の違いは障害物の透過性です。建物の陰や密集した森の中を飛行する際、アナログシステムは重度のノイズが入りますが、ナビゲーションに十分な画像が得られることが多いのに対し、デジタルシステムは完全にフリーズやドロップアウトする傾向があります。デジタルで飛行する際は、障害物にはるかに注意するようになりました。
コスト
各システムに必要な投資額は、多くのパイロットにとって重要な考慮事項です。
アナログ:
- 手頃な参入価格(カメラ20~50ドル、VTX20~60ドル)
- 低価格のゴーグルが利用可能(50~150ドル)
- 個々のコンポーネントを交換しやすい
- 様々なメーカーの互換性のある機器が幅広く揃っている
デジタル:
- 初期投資が高い(カメラ/VTXコンボで150~250ドル)
- 高価なゴーグル(300~700ドル以上)
- 特定のエコシステムに投資する必要がある場合が多い
- 優れたエクスペリエンスにより長期的な価値を提供する可能性がある
私は低コストのため、アナログから始めましたし、初心者にはこの方法をお勧めします。最初のアナログVTXを墜落で壊した時、交換に要したのはわずか25ドルでした。同様の墜落でDJI Air Unitを壊した時は、交換に160ドルかかりました。とはいえ、デジタルへの投資は、飛行体験の向上と動画撮影の質の向上により長期的に見合うものだと感じています。
予算の厳しいパイロットには、まず高品質のアナログシステムから始め、スキルを磨いて墜落が少なくなったらデジタルにアップグレードすることをお勧めします。
消費電力
FPVドローンではバッテリー寿命が貴重なため、電力効率が重要です。
アナログ:
- 一般的に消費電力が低い
- 出力レベルを調整できるシンプルなVTXが利用可能
- 処理要件が最小限
デジタル:
- デジタル処理のため、通常消費電力が高い
- より複雑な冷却要件がある
- 飛行時間への影響が大きい可能性がある
私は実際に様々なシステムの消費電力をワークベンチで測定しましたが、デジタルシステムは一貫して消費電力が高くなっています。同一の5インチフリースタイル機体で、デジタルシステムはアナログと比べて飛行時間が1~1.5分短くなるのが一般的です。この差は、バッテリー容量が限られている小型機ではより顕著になります。3インチのマイクロクアッドでアナログからHDZeroに切り替えたところ、飛行時間が20%近く減少しました。私はデジタル機にはバッテリーを多めに持参するようにして対応しています。
干渉とチャンネル管理
複数のパイロットが同時に飛行する際のシステムの扱いやすさは、グループ飛行の際の重要な考慮事項です。
アナログ:
- 他のパイロットやRF源からの干渉を受けやすい
- 使用可能なチャンネル数が限られている(特にレース環境では)
- 干渉は画像内のノイズやスタティックとして現れる
- グループ飛行では慎重な周波数管理が必要
デジタル:
- 他の信号源からの干渉の除去能力が高い
- 複数のパイロットに対するより効果的なチャンネル管理
- 一部のシステムでは、はるかに多くのパイロットが同時に飛行可能
- 干渉が発生した場合、通常はピクセル化やフリーズが発生する
レースイベントでは、アナログ周波数の管理は常に課題です。パイロットが誤って重複するチャンネルを選択し、関係者全員の映像が使えなくなる「周波数の競合」を何度も経験しました。デジタルシステム(特にDJI)では、はるかに多くのパイロットが問題なく同時に飛行できることがわかりました。
かつて、8人のDJIパイロットがチャンネルの調整なしに飛行していたフライインに参加したことがありますが、全員が完璧な映像を得ていました。同じイベントで、6人のアナログパイロットは周波数プランの作成に1時間近くを費やしましたが、それでも時折干渉が発生していました。この違いだけでも、グループ飛行シナリオではデジタルが魅力的です。
人気のデジタルFPVシステム
近年、それぞれ独自の特徴とターゲットユーザーを持つ複数のデジタルFPVシステムが登場しています。私はこれらのシステムを全て広範にテストしてきました。
DJI デジタルFPVシステム
DJIは、何世代にもわたって進化を遂げてきたシステムでデジタルFPV分野に革命をもたらしました。
主な特徴:
- 高品質の720p/1080p映像伝送
- 比較的低いレイテンシー(理想的な条件下で25~35ms)
- 優れた到達距離と透過性
- ゴーグルに内蔵の録画機能
- サードパーティとの互換性が限定的なクローズドエコシステム
コンポーネント:
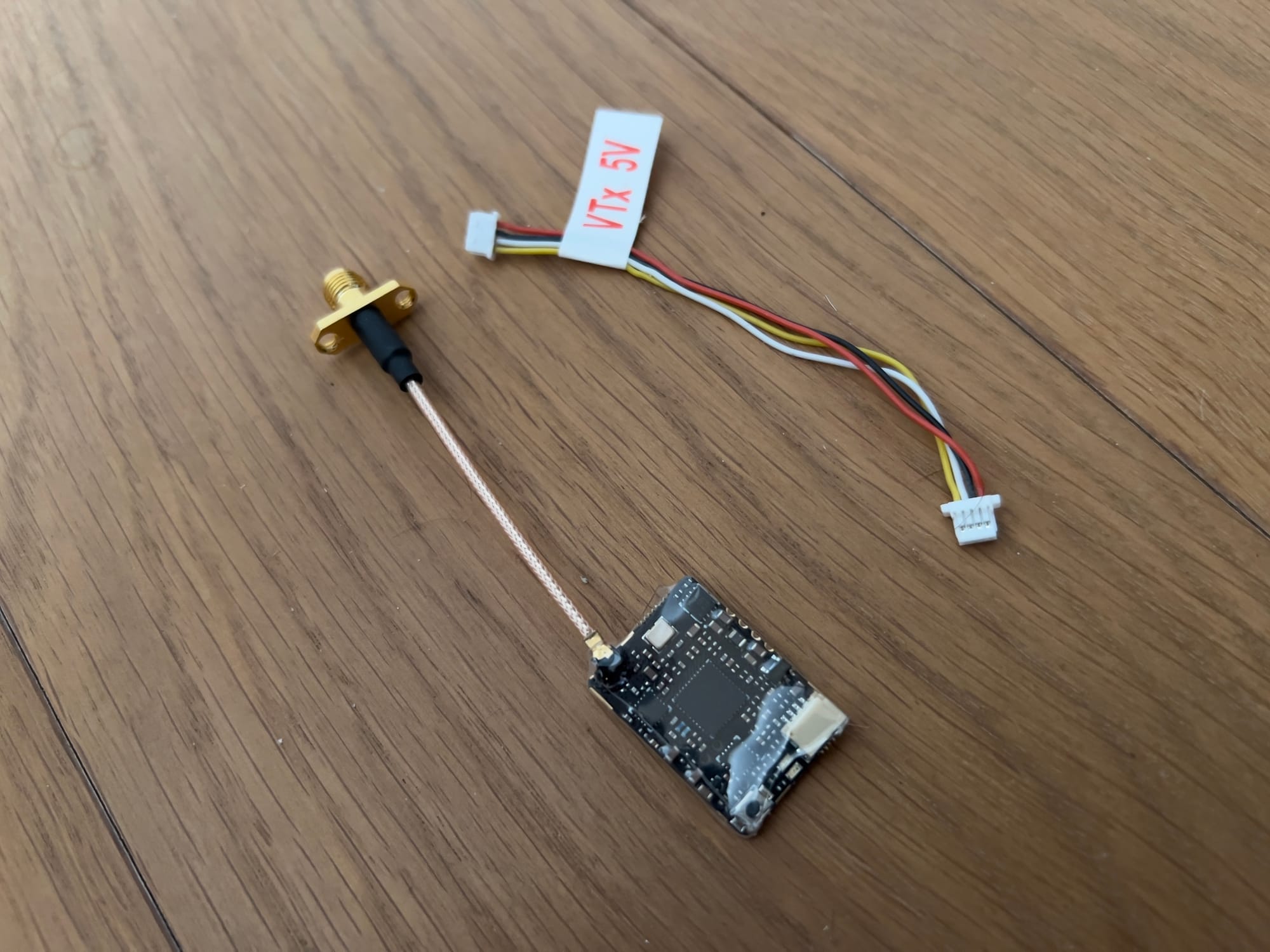
- DJI FPV Air UnitまたはVista/Caddx Vista(送信機)
- DJI FPV Goggles V1/V2/Integra
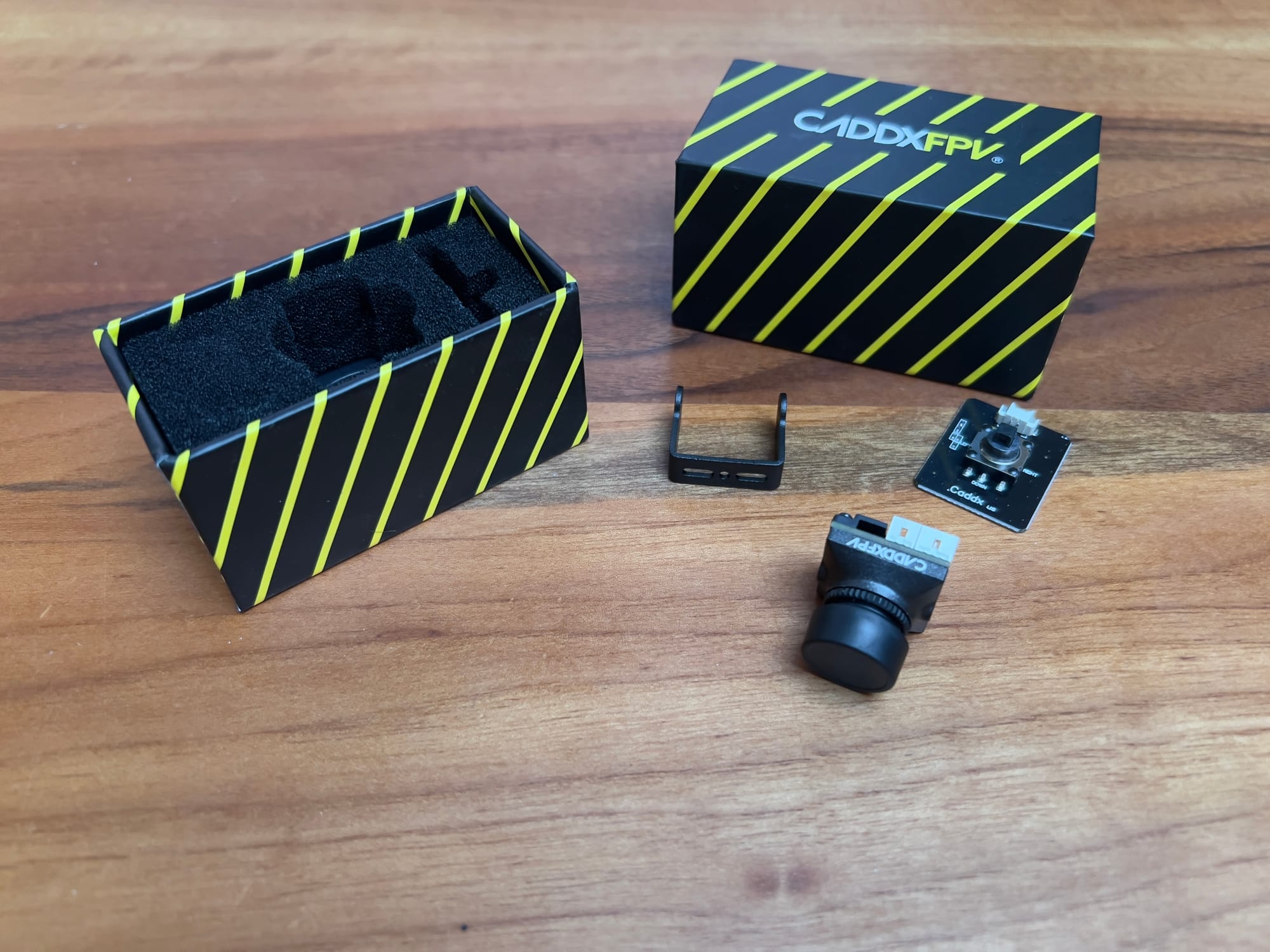
- 互換カメラ(DJI FPV CameraまたはCaddx Polar)
最適な用途:
- シネマティックな飛行
- ロングレンジ探索
- 画質を重視するパイロット
- プレミアムシステムへの投資を厭わない人
私は初期リリース以来DJIシステムを使用していますが、ゴーグルを装着するたびに画質の高さに感動します。私のテストでは到達距離は非常に優れており、見通しの良い地方では10km以上の距離で安定した映像リンクを維持できました。私が遭遇した最大の欠点は、クローズドエコシステム(カメラとVTXの選択肢が限られる)と、予告なく機能を変更する時折のファームウェアアップデートです。


シネマティックな飛行では、DJIの画質に勝るものはありません。GoProで撮影した映像は、ゴーグルで見たものと完全に一致するため、飛行中のショットのフレーミングがはるかに容易になります。
HDZero (旧称 SharkByte)
HDZeroは、デジタル伝送でありながら、レイテンシーや信号劣化の点でアナログに似た特性を持つハイブリッドアプローチを提供しています。
主な特徴:
- 720p/1080pのビデオオプション
- 非常に低いレイテンシー (16-24ms)
- アナログに似た信号の緩やかな劣化
- 複数のメーカーがサポートするよりオープンなエコシステム
- 新機能を定期的に追加するファームウェアアップデート
コンポーネント:
- HDZero VTX (様々な出力オプションを持つ各種モデル)
- HDZero 受信機モジュール (アナログスタイルのゴーグルに適合)
- HDZero ゴーグル
- 互換性のあるカメラ (様々なオプション)
最適な用途:
- アナログのようなレイテンシーでデジタル品質を求めるレーシングパイロット
- 既存のアナログゴーグルを持つパイロット (受信機モジュールを使用可能)
- アナログと完全デジタルの中間を求める人

私は当初、HDZeroに懐疑的でしたが、レーシングで広範にテストした後、特定の用途のために心変わりしました。レイテンシーは、私の並行テストでDJIやWalksnailよりも著しく優れており、突然のドロップアウトではなく信号が徐々に劣化することで、よりクリーンな画像でアナログのように飛行しているように感じられます。
VTXユニットはかなり高温になるため、ビルドでは良好な空気の流れが必要だと感じました。画質はデジタルですが、DJIほどシャープではありません。しかし、レイテンシーが低いというトレードオフにより、レーシング用途では私の好むデジタル選択肢となっています。
Walksnail Avatar システム
デジタルFPV市場の新しい参入者であるWalksnail Avatarシステムは、急速に人気を獲得しています。
主な特徴:
- 1080pビデオ伝送
- 競争力のあるレイテンシー (25-35ms)
- 優れた通信範囲性能
- 統合されたDVR録画
- 互換性を拡大する成長中のエコシステム
コンポーネント:
- Avatar VTX (各種モデル)
- Avatar ゴーグル
- 互換性のあるカメラ
最適な用途:
- DJIの代替を探しているパイロット
- 適度なレイテンシーで良好な画質を求める人
- 進化するエコシステムに興味のあるパイロット
私は初期リリースからWalksnailシステムをテストしており、ファームウェアアップデートを通じて進化する様子を見るのは興味深いものでした。初期バージョンではリンクの安定性と画像の分断に大きな問題がありましたが、最近のアップデートでパフォーマンスが劇的に改善されました。
私のテストでは、Walksnailは、DJIに近い画質で、わずかに優れたレイテンシーを提供します。同一条件下ではDJIほどの通信範囲はありませんが、それでも印象的です。開けた場所では5-7kmの安定したリンクを維持できました。私が発見した利点の1つは、障害物の背後を飛行する際、WalksnailはDJIよりも信号損失からすばやく回復するようです。

エコシステムはまだ発展途上ですが、特により開かれたシステムとハードウェアオプションを好むパイロットにとって、DJIの実行可能な代替手段になりつつあります。
アナログFPVシステムのコンポーネント
アナログシステムは、異なるメーカーのコンポーネントを組み合わせる柔軟性を提供します。私が長年にわたって様々な組み合わせをテストした経験に基づいて、主要コンポーネントの内訳を以下に示します:
アナログFPVカメラ
アナログカメラは、性能特性と価格帯が異なります:
主な仕様:
- TVL (TV Lines): 解像度の尺度、通常は600-1200 TVL
- センサーサイズ: 通常は1/3インチまたは1/2インチ
- 最低照度: 低照度下での性能
- レイテンシー: 内部処理の遅延
- 電圧範囲: 動作電圧 (通常は5-40V)
人気のカメラ:
- RunCam Phoenix 2 (優れたオールラウンダー)
- Foxeer Predator (低レイテンシー)
- Caddx Ratel (優れたダイナミックレンジ)
私は長年にわたって数十台のアナログカメラをテストしてきましたが、その違いは大きいものがあります。レーシングでは、Foxeer Predatorのような低レイテンシーカメラのみを使用しており、エンドツーエンドのレイテンシーは16msという低さを測定しました。フリースタイルでは、明暗の領域間の遷移をはるかに良好に処理するCaddx Ratelのような、より優れたダイナミックレンジのカメラを好んで使用します。

私が苦労して学んだ教訓の1つは、安価なカメラは電圧調整が不十分なことが多いということです。6Sの互換性を謳っているにもかかわらず、6Sバッテリーからの電圧スパイクに耐えられず、3台の低価格カメラを焼き切ってしまいました。品質は重要で、特にバッテリーに直接接続されるコンポーネントではそうです。
アナログビデオトランスミッター (VTX)
VTXには様々なフォームファクターと出力レベルがあります:
主な仕様:
- 出力電力: 一般的に25mWから1000mW (1W)
- 周波数帯: 5.8GHzが標準で、様々なチャンネルオプションがあります
- スマートオーディオ/Trampプロトコル: リモート設定用
- サイズと重量: 小型ビルドでは重要
- 冷却要件: 高出力ユニットはより良い冷却が必要
人気のVTX:
- TBS Unify Pro32 (信頼性が高く、広く使用されている)
- Rush Tank (高出力オプション)
- AKK (予算に優しいオプション)
数多くのVTXを試した結果、私はほとんどのビルドでTBS Unify Proを使用しています。その信頼性と明瞭な出力信号のためです。しかし、多くの場合、ブランドよりも適切な設置の方が重要だと感じています。適切なフィルタリングコンデンサと冷却を備えた低価格のVTXは、高価なVTXでも設置が不適切な場合よりも優れたパフォーマンスを発揮します。
ロングレンジ飛行では、最大1Wまで調整可能なRush Tank Ultimateを使用しています。余分な電力は距離を伸ばす上で大きな違いをもたらしますが、発熱量が非常に大きいです。高出力のVTXに近づけすぎて3Dプリント部品を溶かしてしまったこともあります!
アナログFPVゴーグルとレシーバー
アナログゴーグルは基本的なものから機能豊富なものまで幅広くあります:
主な仕様:
- レシーバータイプ: ダイバーシティーvs.シングルレシーバー
- ディスプレイ解像度: 画像の鮮明さに影響
- 視野角(FOV): 没入感の要因
- DVR機能: フライトの記録用
- モジュールベイ: アップグレード性のため
人気のゴーグル:
- Fat Shark Attitude V6 (中級オプション)
- Skyzone Sky04X (機能豊富)
- Eachine EV800D (低価格のボックスゴーグル)

予算の限られた新しいパイロットには、ボックスゴーグルから始めることをお勧めしますが、高品質のダイバーシティレシーバーに投資することをお勧めします。後でより良いゴーグルにアップグレードする際、レシーバーモジュールを再利用できることが多いため、価値のある投資となります。

私の場合、アダプターを介してゴーグルに接続されたアナログレシーバーでアナログFPVシステムの世界への旅を始めました。互換性のあるシステムをすでにお持ちの場合は良い選択肢です。
アンテナ
アンテナの選択は、ビデオのパフォーマンスに大きな影響を与えます:
タイプ:
- 無指向性: あらゆる方向で同等の受信(例:パゴダ、クローバーリーフ)
- 指向性: 特定の方向でより良い範囲(例:パッチ、ヘリカル)
- 偏波: RHCP(右旋円偏波)またはLHCP(左旋円偏波)
考慮事項:
- 送信機と受信機で同じ偏波を使用する
- ダイバーシティ設定では、多くの場合、1つの無指向性アンテナと1つの指向性アンテナを使用する
- 品質が重要—低価格のアンテナはしばしば性能不足
アンテナはFPVシステムの中で最も過小評価されているコンポーネントです。15ドルのアンテナのアップグレードで、システムの有効範囲が2倍になったのを見たことがあります。ロングレンジビルドでは、ドローンにTrueRC X-Airを、ゴーグルにTrueRC Singularity(無指向性)とVAS 8ターンヘリカル(指向性)の組み合わせを使用しています。
私が初期に犯した間違いの1つは、偏波の不一致でした。ドローンにはRHCPを、ゴーグルにはLHCPを使用していました。経験豊富なパイロットが私の間違いを指摘するまで、信号はひどいものでした。常に偏波を一致させてください!
VTXアンテナの詳細については、以下をご覧ください:
FPVアンテナの概要
アナログとデジタルの選択
適切な選択は、優先事項、予算、飛行スタイルによって異なります。何年もの間、両方のシステムを飛行した後、ここに私の実践的なアドバイスがあります:
アナログを検討する場合:
- 予算が限られている場合: 初期投資が少ない
- レイテンシを優先する場合: レーシングと高速フリースタイルに不可欠
- グループで飛行する場合: 確立されたプロトコルで周波数管理が容易
- 修理性を重視する場合: 個々のコンポーネントの交換コストが安い
- いじることが好きな場合: コンポーネントのミックスアンドマッチでDIYに適している
デジタルを検討する場合:
- 画質を優先する場合: HD解像度は大きな違いをもたらす
- ロングレンジを飛行する場合: 開けた場所でより良い最大範囲
- シネマティックな飛行をする場合: 美しい映像を撮影するためのクリーンな画像
- ユーザーエクスペリエンスを重視する場合: 干渉が少なく、全体的にクリーンな体験
- 投資する意思がある場合: より良い体験のために高い初期コスト
この決定を下すのを手伝った数十人のパイロットに対して、私は通常、ホビーに新しい人や予算が限られている人にはアナログから始めることをお勧めしています。参入コストと交換部品のコストが低いため、学習中の避けられないクラッシュによる財政的な痛手が少なくて済みます。スキルを身につけ、飛行スタイルの好みをよりよく理解したら、デジタルへのアップグレードについてより情報に基づいた決定を下すことができます。
経験豊富なパイロットには、主な飛行スタイルに基づいて選択することをお勧めします:
- レーシングの場合: アナログを使い続けるか、HDZeroを検討する
- フリースタイルの場合: どちらのシステムも適しており、デジタルの方がより良いビジュアル体験を提供する
- ロングレンジの場合: デジタルシステムは一般的により良い範囲と明瞭さを提供する
- シネマティックな場合: デジタルは美しい映像を撮影するのに著しく優れている
ハイブリッドアプローチ
一部のパイロットは、両方の長所を生かすためにハイブリッド設定を選択します:
- デュアルシステムビルド: アナログとデジタルの両方のシステムを1台のドローンに搭載するパイロットもいます
- 混合機体: 目的に応じて異なるドローンを使用(映画撮影用にデジタル、レース用にアナログ)
- 中間点としてのHDZero: アナログに近い特性を持つデジタルビデオ
私は、異なる目的のために、アナログとデジタルの両方のドローンを機体に維持しています。レース用クワッドはすべてアナログで、可能な限り低いレイテンシーを実現しています。フリースタイルと長距離用のビルドはほとんどデジタルで、優れた画質を実現しています。このアプローチにより、妥協することなく両方の世界の最良の部分を得ることができます。
また、アナログとデジタルの両方のシステムを搭載し、リモートコントロールチャンネルで切り替え可能な「ハイブリッド」ドローンも数機製作しました。このアプローチはうまく機能しますが、重量と複雑さが増します。システム間の切り替えが必要になる可能性のあるイベントでの飛行など、特定のユースケースにのみお勧めします。
高度な考慮事項
ビデオシステムを最適化したい経験豊富なパイロットのために、これらの高度な概念は、私の長年のテストと実験から得られた深い洞察を提供します。
周波数管理と干渉
周波数の管理方法を理解することで、ビデオ体験を大幅に改善できます:
- 周波数帯: 5.8GHzが標準ですが、特定の周波数帯(A、B、E、F、R など)は国によって法的地位が異なります
- チャンネル間隔: パイロット間の周波数に適切な間隔を維持すること
- 電力管理: 必要な電力のみを使用することで、全員の干渉を減らすことができます
- IMD(相互変調歪み): 複数の送信機が、誰も送信していないチャンネルで干渉を引き起こすこと
大規模なレースイベントで、周波数管理の不備により複数のパイロットの映像が完全に途切れるのを目撃しました。適切なチャンネル間隔と電力制御により、適切な周波数計画を実施することで問題を解決しました。現在では、グループフライトセッションの前に必ず周波数アナライザを使用して、利用可能な最もクリーンなチャンネルを特定しています。
また、IMDはグループフライトシナリオで実際の問題であることがわかりました。6人以上のパイロットで飛行する場合、相互変調の影響により、誰も使用していないチャンネルで干渉が発生することがよくあります。私の経験では、デジタルシステムはこの問題の影響を受けにくいです。
ビデオ信号の最適化
最適なパフォーマンスを得るためのビデオシステムの微調整:
- カメラ設定: 異なる条件に合わせてWDR、彩度、シャープネスを調整する
- VTXフィルタリング: コンデンサとフィルタを使用してVTXへの電力をクリーンアップする
- アンテナ配置: アンテナを炭素繊維やその他の干渉源から離す
- 地上局セットアップ: 最適化されたアンテナの組み合わせでダイバーシティレシーバーを使用する
適切な電力フィルタリングにより、アナログビデオの品質が劇的に向上することがわかりました。すべてのビルドで、低ESRコンデンサ(470〜1000μF)をVTX電力入力にできるだけ近づけて追加しています。この簡単な変更により、初期のビルドを悩ませていた横線の問題が解消されました。
アンテナ配置については、炭素繊維からわずか数ミリ離すだけでも大きな違いが出ることを試行錯誤の末に学びました。現在では、アンテナを炭素繊維部品から少なくとも10mm離して配置する3Dプリントアンテナマウントを使用しており、ビデオの品質と範囲が目に見えて向上しました。
デジタルシステムのビットレートと品質設定
デジタルシステムには、画質、レイテンシー、および範囲のバランスをとるさまざまな品質設定があります:
- 高ビットレート: 画質は向上しますが、レイテンシーが高くなり、範囲が狭くなる可能性があります
- 低ビットレート: 画質を犠牲にして、範囲を拡張し、レイテンシーを低くできる可能性があります
- 固定ビットレートと可変ビットレート: システムが変化する条件にどのように適応するか
- エラー訂正レベル: レイテンシーの増加を犠牲にして、より堅牢な伝送を実現
DJIシステムでは、さまざまな品質設定を広範囲に試してきました。ほとんどの飛行では、優れた画質と許容できるレイテンシーを提供する「高品質」モードを使用しています。ただし、長距離飛行の場合は、最大の画質よりも安定した接続を優先する「フォーカス」モードに切り替えます。
DJIシステムの自動ビットレート調整はほと�んどのシナリオでうまく機能することがわかりましたが、RFの干渉が大きい地域では、ビットレートを手動で低く設定すると、より安定した接続を提供できます。これは、多くのWiFiネットワークがある都市環境で飛行する場合に特に重要です。
投資の将来への備え
FPVテクノロジーの状況は急速に進化し続けています:
- モジュラーシステム: モジュールベイ付きのゴーグルに投資すると、ユニット全体を交換せずにレシーバーをアップグレードできます
- ファームウェアのアップグレード可能性: 活発に開発されているシステムは、時間の経過とともに改善される可能性があります
- エコシステムの考慮事項: 一部のメーカーは閉鎖的なエコシステムを構築していますが、他のメーカーは互換性を重視しています
- 転売価値: 一部のブランドとシステムは、他のものよりも価値を維持します
モジュラーシステムが最も長期的な価値を提供することがわかりました。私のFat Sharkゴーグルは、長年にわたって複数のレシーバーモジュールのアップグレードを受け入れており、ユニット全体を交換せずにパフォーマンスを向上させることができました。同様に、HDZeroモジュールを搭載したSkyzoneゴーグルは、アナログまたはデジタルのいずれかのシステムを使用する柔軟性を提供します。
デジタルシステムの場合、ファームウェアのサポートは非常に重要です。私の初期のDJI Air Unitは、パフォーマンスを向上させ、機能を追加し、バグを修正する数多くのファームウェアアップデートを受けました。デジタルシステムを選択する際は、ファームウェアサポートに関するメーカーの実績を重要な要素として考慮するようになりました。
実用的なセットアップと最適化のヒント
これらの実用的なヒントは、私の長年の構築と飛行の経験に基づいて、選択したFPVシステムを最大限に活用するのに役立ちます。
アナログシステムの最適化
- 高品質のアンテナを使用する: おそらく、あらゆるアナログシステムで最もコストパフォーマンスの高いアップグレード
- コンデンサを追加する: VTX電源入力の近くに低ESRコンデンサ(例: 470μF)を追加すると、ノイズを減らすことができます
- 適切なカメラ設定: 現在の照明条件に合わせてカメラ設定を調整する
- 周波数スキャナ: 飛行前にスキャナを使用してクリアなチャンネルを見つける
- VTXの取り付け: VTXを熱源から離し、適切な空気の流れを確保する
アナログレースクワッドでは、クリーンなビデオを得るには適切な電力フィルタリングが不可欠であることがわかりました。バッテリーリード付近の大型電解コンデンサ(470〜1000μF)と、ESCなどのノイズ生成コンポーネント付近の小型セラミックコンデンサ(100〜220μF)を組み合わせて使用しています。この設定により、モーターとESCの動作によるビデオノイズがほぼ完全に排除されます。
VTXの取り付けについては、熱が敵であることを痛い目に遭って学びました。高価なVTXを2台焼損した後、特にハイパワーのものについては、すべてのビデオトランスミッターの周囲に適切な空気の流れを確保するようにしています。スペースが限られているビルドでは、熱接着剤でVTXに小型ヒートシンクを追加しており、過熱の問題を防いでいます。
デジタルシステムの最適化
- アンテナの配置: カーボンファイバーやその他の障害物からアンテナを離す
- ファームウェアの更新: すべてのコンポーネントを最新のファームウェアで更新する
- 品質設定: 飛行環境に基づいてビットレートと品質設定を調整する
- 電力管理: 飛行距離に適した電力レベルを使用する
- 冷却に関する考慮事項: より多くの熱を発生するデジタルコンポーネントに適切な冷却を確保する
私のDJIシステムでは、アナログよりもアンテナの配置がさらに重要であることがわかりました。 DJIアンテナは、カーボンファイバーや電源コンポーネントの近くに特に敏感であるようです。私は常に、アンテナをフレームからできるだけ遠くに配置するアンテナマウントを使用しており、これにより範囲と安定性が大幅に向上しました。
ファームウェアの更新により、私のデジタルシステムは時間とともに劇的に改善されました。私の最初のDJI Air Unitは、数多くのファームウェアの改善のおかげで、最初に購入したときよりもはるかに優れたパフォーマンスを発揮しています。私は重要な飛行セッションの前に、習慣的に更新をチェックしています。
一般的な問題のトラブルシューティング
アナログの問題:
- 水平線のローリング: 多くの場合、電源ノイズが原因
- 静電気やスノー: 信号が弱いか干渉がある
- ブルースクリーン: 完全な信号損失
- ぎくしゃくした画像: カメラや電源の問題の可能性
水平線のローリングについては、低ESRコンデンサ(470-1000μF)をVTX電源入力にできるだけ近づけることで、ほぼ100%の成功率で修正できました。問題が解決しない場合は、カメラとESCの近くに追加のフィルターコンデンサを追加します。
静電気やスノーについては、まずすべてのアンテナ接続をチェックし、しっかりと固定されていることを確認します。問題が解決しない場合は、干渉の少ない別のチャンネルを試してみてください。グループフライングのシナリオでは、他のパイロットと周波数を調整することが不可欠です。
デジタルの問題:
- ピクセル化: しきい値に近づくと信号が劣化する
- 画像のフリーズ: 信号品質が使用可能なしきい値を下回った
- アーティファクト: デジタル圧縮の問題
- 接続エラー: ペアリングまたは初期化の問題
DJIの接続問題については、初期化シーケンスが重要であることがわかりました。私は常にゴーグルを最初に電源オンにしてから、ドローンを電源オンにします。このシーケンスは、逆の順序よりも信頼性が高いことが証明されています。
ピクセル化やアーティファクトについては、品質設定を調整すると改善されることがよくあります。高干渉の RF 環境では、画質よりも接続の安定性を優先する低品質モードに切り替えます。このアプローチにより、干渉の多い地域でいくつかのフライトを救うことができました。
FPVビデオシステムの未来
FPVビデオの状況は急速に進化し続けており、その未来を形作るいくつかの傾向があります:
技術の融合
- デジタル遅延の減少: アナログ遅延レベルに近づくデジタルシステム
- アナログ解像度の向上: 解像度の限界に挑戦する強化されたアナログシステム
- ハイブリッドシステム: 両方の技術の長所を組み合わせる
私が目撃した急速な発展に基づいて、今後2〜3年以内にデジタルシステムがアナログのような遅延レベルに到達すると信じています。 HDZeroはすでにこの方向に大きな進歩を遂げています。同時に、アナログシステムは解像度と明瞭さの面で改善し続けますが、真のHDデジタルシステムに匹敵することはおそらくないでしょう。
私が最も期待している開発は、両方の技術の最良の側面を組み合わせた真のハイブリッドシステム、つまりアナログのような信号劣化と超低遅延を備えたデジタルの明瞭さです。いくつかのメーカーがそのようなシステムに取り組んでおり、それらはFPVビデオの未来を表す可能性があります。
新しい技術
- AI強化ビデオ: 人工知能を使用して画質を向上させ、遅延を減らす
- 代替周波数: ビデオ伝送用の2.4GHzおよび6GHzバンドの探索
- 制御リンクとの統合: セットアップを簡素化するための統合ビデオおよび制御システム
私は、困難な条件下で画質を劇的に改善できるAI強化ビデオ処理の初期バージョンをテストしています。これらのシステムは機械学習を使用して、ノイズを低減し、詳細を強調し、信号損失の場合に欠落したフレームを予測します。まだ初期段階ですが、結果は有望であり、FPVビデオ技術の次の大きな飛躍を表す可能性があります。
規制に関する考慮事項
- 周波数規制: 利用可能な周波数に影響を与える国際ルールの変更
- 電力制限: 送信電力に関する法的制限
- 標準化の取り組み: 共通の標準に向けた業界の動き
規制の変更はすでにこの趣味に大きな影響を与えています。ヨーロッパでは、特定の5.8GHzバンドに関する制限により、メーカーは周波数の提供を適応させる必要がありました。私は、地域間でのより多くの標準化と、電力と周波数の使用に関するより多くの制限の可能性を含め、このトレンドが続くと予想しています。
パイロットにとって、地域の規制について情報を得ることがますます重要になっています。私は、訪れる国ごとに周波数と電力規制のドキュメントを維持し始めました。これは、FPVギアで旅行するときに潜在的な法的問題を回避するのに役立っています。
FAQ: FPVビデオシステムに関する一般的な質問
デジタルFPVは追加コストに見合う価値がありますか?
私の経験では、レース以外のほとんどのタイプの飛行では、はいと言えます。デジタルシステムの改善された画質とクリーンな信号は、特に映画的な飛行や長距離探査のために投資を正当化します。ただし、主にレースに重点を置いている場合や、予算が限られている場合は、アナログシステムでも低価格で優れたパフォーマンスを発揮します。
私はアナログから始めて、趣味に約1年後にデジタルにアップグレードしました。移行は目を見張るものでした。突然、以前はぼやけた形でしか見えなかった細部が見えるようになりました。フリースタイルや映画的な飛行のために、この明瞭さが私の経験を変えました。
アナログゴーグルをデジタルシステムで使用できますか?
それはデジタルシステムによって異なります。 HDZeroは、モジュールベイを備えたアナログゴーグルで動作するレシーバーモジュールを提供しています。 DJIとWalksnailのシステムは通常、特定のゴーグルを必要としますが、サードパーティのオプションも登場しています。
私はHDZeroをレシーバーモジュール経由でSkyzoneゴーグルで使用しており、うまく機能しています。 DJIの場合、専用のゴーグルを購入する必要がありました。既存のアナログゴーグルをそのシステムで使用する方法はありませんでした。
レースに最適なデジタルシステムは何ですか?
私の広範なテストに基づいて、HDZeroは現在、デジタルシステムの中で最も低い遅延を提供しており、デジタルレースの優先選択肢となっています。その徐々に信号が劣化することも、多くのレーサーが好むアナログのように動作します。
私はHDZeroとアナログシステムの両方でレースをしましたが、競争レースでは絶対的に最低の遅延のためにアナログを好んでいますが、HDZeroは画質の向上により、多くのレーサーにとって魅力的なオプションになるほど十分に近いです。
アナログとデジタルではどのくらいの範囲を期待できますか?
見通しの良いオープンエリアでは、私の個人的なテストに基づいて以下のようになります:
- 基本的なアナログセットアップ: 0.5-1km
- 指向性アンテナを使用した最適化されたアナログ: 2-5km
- デジタルシステム (DJI/Walksnail): 5-13km
- レンジエクステンションを使用したデジタル: 10-20km以上
実際の範囲は、環境、障害物、干渉、およびシステム構成に基づいて大幅に異なります。私が発見したのは、実際のパフォーマンスは理論上の最大値に満たないことがよくあるということです。例えば、地方では10kmに達することができる私のDJIシステムは、他のRF源からの干渉のために、密集した都市環境では2-3kmしか管理できないかもしれません。
ビデオトランスミッターの出力を合法的に上げることはできますか?
国によって規制は異なりますが、多くの地域では、特別なライセンスなしでアマチュアビデオトランスミッターを25mWまたは100mWに制限しています。トランスミッター出力を上げる前に、必ずお住まいの地域の規制を確認してください。違反すると、かなりの罰金が科せられる可能性があります。
私は、トランスミッター出力を法的制限を超えて押し上げるのではなく、アンテナセットアップを最適化することで、法的出力制限内で動作するように学びました。品質の高いアンテナセットアップは、法的出力で、高出力の貧弱なアンテナセットアップよりもパフォーマンスが優れていることが多く、法の正しい側にとどまるという利点があります。
デジタルシステムは都市環境でより良く機能しますか?
一般的にはい。私が発見したのは、デジタルシステムは、アナログシステムよりもマルチパス干渉(建物からの信号反射)をはるかに良好に処理するということです。また、アナログ信号が最大範囲に達する前に干渉のために使用できなくなる可能性があるのに対し、信号が完全にドロップアウトするまでクリアな画像を維持します。
都市環境での私のテストでは、アナログが高出力で動作している場合でも、DJIシステムは常にアナログセットアップを上回っています。デジタル信号処理は、都市部で普及しているノイズや干渉をフィルタリングするのにはるかに効果的であるようです。
適切なアンテナを選ぶにはどうすればよいですか?
私の広範なテストに基づく最良の結果のために:
- トランスミッターとレシーバーのアンテナの偏波を一致させる
- 一般的な飛行には無指向性アンテナを使用する
- 拡張範囲のためにダイバーシティレシーバーに指向性アンテナを追加する
- 評判の良いメーカーの高品質アンテナに投資する
- 特定の飛行スタイルに合わせてアンテナゲイン特性を検討する
私が発見したのは、アンテナの品質が非常に重要だということです。かつて、私は5ドルの「格安」アンテナを評判の良いメーカーの25ドルの高品質アンテナに交換しただけで、セットアップに他の変更を加えることなく、有効範囲がほぼ2倍になりました。
アナログFPVは最終的に消えてしまうのでしょうか?
デジタルシステムは人気を博し続けていますが、アナログFPVは、低コスト、最小限の遅延、および確立されたエコシステムにより、今後数年間は関連性を維持すると私は信じています。私を含む多くのパイロットは、異なるタイプの飛行のために両方のシステムを維持しています。
特にレーシングシーンでは、超低遅延のためにアナログが好まれ続けています。デジタルシステムが妥協することなくアナログの15-20msの遅延に匹敵できるようになるまで、競争レースにはアナログの居場所が常にあるでしょう。
結論
アナログとデジタルのFPVシステムの選択は、優先事項、好み、予算の考慮事項のバランスを表しています。デジタルシステムは優れた画質とクリーンな全体的なエクスペリエンスを提供しますが、アナログシステムは遅延、コスト、柔軟性の面で優位性を維持しています。
技術が進化し続けるにつれて、これらのシステム間のギャップは縮小しており、デジタルの遅延は減少し、アナログの画質は向上しています。私を含む多くのパイロットにとって、理想的なアプローチは、別々のビルドまたはハイブリッドセットアップを通じて、両方の技術を経験することです。
最終的に、アナログとデジタルの両方のシステムは、信じられないほどの飛行体験を提供できます。「正しい」選択は、画質、遅延、範囲、コストなどの要因をどのように優先するかによって、特定のニーズ、飛行スタイルによって異なります。どちらの道を選んでも、FPVフライトの没入型エクスペリエンスは、ホビーの最もエキサイティングな側面の1つであり続けます。


